Transform
Transform 컴포넌트이다.
다른 컴포넌트들과 달리 부모와 자식, 그리고 좌표계를 갖고있다.
Transform.h
#pragma once
#include "IComponent.h"
class Transform final : public IComponent
{
public:
Transform(class Actor* actor, class Transform* transform);
~Transform();
void Initialize() override;
void Update() override;
void Destroy() override;
/*
* local
*/
const D3DXVECTOR3& GetLocalScale() { return local_scale; }
void SetLocalScale(const D3DXVECTOR3& local_scale);
const D3DXVECTOR3& GetLocalPosition() { return local_position; }
void SetLocalPosition(const D3DXVECTOR3& local_position);
const D3DXVECTOR3& GetLocalRotation() { return local_rotation; }
void SetLocalRotation(const D3DXVECTOR3& local_rotation);
const D3DXMATRIX& GetLocalMatrix() const { return local; }
/*
* world
*/
const D3DXVECTOR3 GetScale();
void SetScale(const D3DXVECTOR3& scale);
const D3DXVECTOR3 GetPosition();
void SetPosition(const D3DXVECTOR3& position);
const D3DXVECTOR3 GetRotation();
void SetRotation(const D3DXVECTOR3& rotation);
const D3DXMATRIX GetWorldRotationMatrix() const;
const D3DXMATRIX& GetWorldMatrix() const { return world; }
const D3DXVECTOR3 GetRight();
const D3DXVECTOR3 GetUp();
const D3DXVECTOR3 GetForward();
/*
* transform
*/
bool HasParent() const { return parent != nullptr; };
bool HasChilds() const { return !childs.empty(); }
Transform* GetRoot() { return HasParent() ? parent->GetRoot() : this; }
Transform* GetParent() const { return parent; }
void SetParent(Transform* const new_parent);
const std::vector<Transform*>& GetChilds() const { return childs; }
Transform* GetChildFromIndex(const uint& undex) const;
const uint GetChildCount() const { return static_cast<uint>(childs.size()); }
void AddChild(Transform* const child);
void UpdateTransform();
private:
D3DXVECTOR3 local_scale = D3DXVECTOR3(1, 1, 1);
D3DXVECTOR3 local_position = D3DXVECTOR3(0, 0, 0);
D3DXVECTOR3 local_rotation = D3DXVECTOR3(0, 0, 0);
D3DXMATRIX local; // local s * r *t
D3DXMATRIX world; // local * parent
Transform* parent = nullptr;
std::vector<Transform*> childs;
};
갖고있는 변수로는 좌표와 부모, 자식 Transform들이다.
Scale
void Transform::SetScale(const D3DXVECTOR3& world_scale)
{
if (GetScale() == world_scale)
{
return;
}
D3DXVECTOR3 scale;
if (HasParent())
{
D3DXVECTOR3 scale;
D3DXVECTOR3 parent_scale = parent->GetScale();
scale.x = world_scale.x / parent_scale.x;
scale.y = world_scale.y / parent_scale.y;
scale.z = world_scale.z / parent_scale.z;
}
SetLocalScale(world_scale);
}
갖고있는 크기에 부모의 크기를 나눠서 넣어준다.
크기 부분은 조금만 생각하면 알 수 있다.
월드 크기가 10인 오브젝트에 월드 크기가 5인 오브젝트를 자식으로 넣으면
자식 오브젝트는 크기가 부모의 절반이기 때문에 0.5가 된다.
Position
void Transform::SetPosition(const D3DXVECTOR3& world_position)
{
if (GetPosition() == world_position)
{
return;
}
if (HasParent())
{
D3DXMATRIX inverse;
D3DXMatrixInverse(&inverse, nullptr, &parent->GetWorldMatrix());
D3DXVECTOR3 position;
D3DXVec3TransformCoord(&position, &world_position, &inverse);
SetLocalPosition(position);
}
else
{
SetLocalPosition(world_position);
}
}
자식으로 있는 오브젝트의 좌표는 부모 기준의 좌표에서 갖고있는 값만큼 움직인 상태이다. 이 상태에서 만약 100을 이동하면, 부모의 기준에서 100만큼을 이동하게 된다. 그래서 부모의 좌표값을 뺀 다음 100을 이동시킨다.
따라서 D3DXMatrixInverse을 하는 이유는 월드 좌표에서 부모 좌표의 역을 곱하고,
D3DXVec3TransformCoord으로 움직인다.
- D3DXVec3TransformCoord
- 위치 반환
- D3DXVec3TransformNormal
- 벡터 반환
Rotation
가장 까다롭다.
void Transform::SetRotation(const D3DXVECTOR3& world_rotation)
{
if (GetRotation() == world_rotation)
{
return;
}
if (HasParent())
{
D3DXMATRIX inverse;
D3DXMatrixInverse(&inverse, nullptr, &GetWorldRotationMatrix());
D3DXVECTOR3 rotation;
D3DXVec3TransformNormal(&rotation, &world_rotation, &inverse);
SetLocalRotation(rotation);
}
else
{
SetLocalRotation(world_rotation);
}
}
여기선 Position과 진행 하고 마지막에 벡터를 변환한다. 하지만, GetRotation을 보자
const D3DXVECTOR3 Transform::GetRotation()
{
D3DXQUATERNION world_rotation;
D3DXMatrixDecompose(&D3DXVECTOR3(), &world_rotation, &D3DXVECTOR3(), &world);
D3DXMATRIX rotation;
D3DXMatrixRotationQuaternion(&rotation, &world_rotation);
return D3DXVECTOR3 // Y - X - Z 순
(
atan2(rotation._31, rotation._32),
atan2(-rotation._32, sqrt(pow(rotation._12,2) + pow(rotation._22, 2))),
atan2(rotation._12, rotation._22 )
);
}
반환값이 복잡하다.
저건 Y - X - Z 순으로 변환할때 계산식이다.
지금은 2D 기준으로 회전시켜서 한번만 변환 했지만, 3D환경에서 회전은 좀 다르다
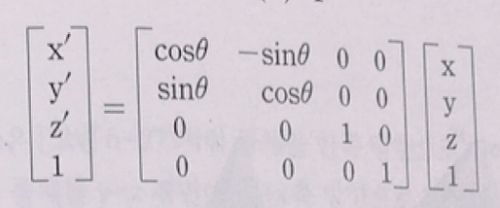
Z축 기준 회전
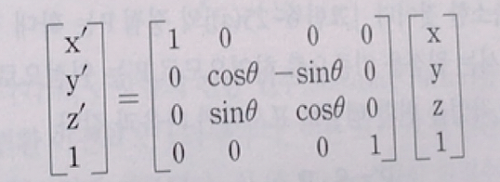
X축 기준 회전
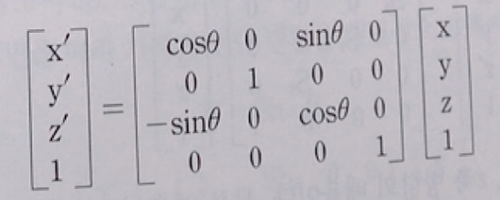
Y축 기준 회전
이런 기준으로 회전한다.
나머지 함수들은 딱히 특별한게 없어서 적지 않았다.